limp.freq
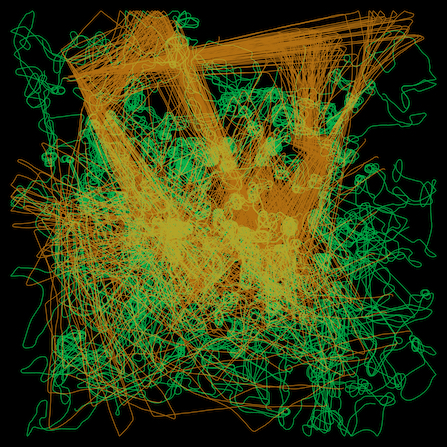
limp.freq uses populations of self-navigating, cybernetics-inspired bots to explore how localised locomotion asymmetries—such as the artist’s own leg length discrepancy (LLD)—can have cascading effect on spatial use and navigation. By foregrounding the richness and alternative experiences of imperfection, the bots propose a more pluralistic spatial logic, but also an alternate history of AI, grounded in the potentials of difference.
The project favours interactive play over passive reception. Try out the four simulators at the heart of the project in your browser by clicking the links below. Three optional tutorials are also provided.